CASE STUDY: Intralogistics 3D Simulation Video
Visualizing the Future of Fulfillment
Executive Summary
In the rapidly evolving sector of warehouse automation, demonstrating the efficiency of complex robotic systems requires more than technical diagrams; it demands immersive visual proof. Advids partnered with a leading logistics technology provider to create a photorealistic Three-Dimensional simulation of their "Goods-to-Person" solution. By translating dense engineering data into a fluid, cinematic narrative, we successfully communicated the system's ability to reduce picking labor by 95 percent and increase storage density, providing a powerful sales tool for global stakeholders.
The Complexity of Autonomous Logistics
The client faced a significant communication hurdle: their solution involves a sophisticated fleet of autonomous robots navigating standard warehouse shelving—a concept simple in theory but complex in execution. Static Computer-Aided Design drawings failed to convey the speed, fluidity, and coordinated intelligence of the fleet. They needed a medium that could visualize the "invisible" logic of the system, demonstrate the mechanical precision of the picking robots, and prove the scalability of the solution across massive warehouse footprints, all without the logistical nightmare of filming inside a live, secure facility.
Engineering a Digital Twin
Advids deployed the Advids Precision Visualization Workflow, a specialized pipeline designed for industrial and technical storytelling. We approached this project not just as an animation, but as a simulation. By ingesting the client's actual engineering files, we created a "Digital Twin" of the warehouse environment. This approach allowed us to showcase the system's compatibility with standard shelving, the precise mechanics of the robotic suction grippers, and the massive scale of multi-level fulfillment centers with photorealistic accuracy.
Client Profile
Industry: Supply Chain & Logistics Automation
Focus: Robotic Order Fulfillment Systems
Key Market: E-commerce and Grocery Retailers
Headquarters: Global
Primary Objective
To produce a high-fidelity 3D simulation video that clearly articulates the system's three core value propositions: rapid installation using standard shelving, significant reduction in picking labor, and high-density storage capabilities.
The Advids Precision Visualization Workflow
This project was executed using our proprietary framework for high-end industrial animation, ensuring engineering accuracy met cinematic aesthetics.
The Workflow Stages:
- Data Ingestion & Optimization: Tessellation of Computer-Aided Design assemblies.
- Look Development: Physically Based Rendering (PBR) material creation.
- Technical Animation: Rigging and animating mechanical kinematics.
- Scene Assembly: Procedural generation of warehouse environments.
- Lighting & Rendering: Global Illumination and photorealistic output.
- Compositing: Data overlay integration and final color grading.
Project at a Glance
| Component | Specification |
|---|---|
| Project Type | Intralogistics 3D Simulation Video |
| Target Audience | Logistics Directors, CTOs, Warehouse Operations Managers |
| Primary Format | 4K 60fps Digital Video |
| Animation Style | Photorealistic 3D Industrial Simulation |
| Collaboration Stack | Slack (Real-time Communication), Google Drive (Asset Management), Vimeo Review (Video Feedback) |
| Key Output | Final_Master_Simulation_v04.mp4 |
Production Timeline: From CAD to Cinema
- Week 1: Discovery & Data Ingestion
- Received raw engineering files:
Robot_Assembly_Master_v12.stepandShelving_Specs_DWG.zip. - Milestone: Polygon reduction strategy approved.
- Received raw engineering files:
- Week 2: Previsualization (The Animatic)
- Created a low-fidelity grayscale animation to lock in camera moves and timing.
- Quote (Advids Internal): "The camera speed in the aisle needs to match the actual robot velocity to maintain technical accuracy."
- Output:
Animatic_Flow_v02.mp4.
- Week 3-4: Look Development & Environment Build
- Applied Physically Based Rendering materials to the robots (powder-coated metal, rubber grippers).
- Constructed the massive warehouse environment using procedural cloning.
- Week 5: Technical Animation & Simulation
- Animated the picking arm kinematics and the fleet traffic logic.
- Artifact:
Sim_Test_Suction_Mechanism_v03.mp4.
- Week 6: Lighting & Rendering
- Setup Global Illumination to simulate realistic warehouse lighting conditions.
- Milestone: First High-Resolution Style Frames approved.
- Week 7: Compositing & Text Overlays
- Integrated kinetic typography to highlight key metrics (e.g., "250% Increase in Storage Density").
- Week 8: Final Mastering
- Color grading and sound design integration.
- Final Output:
Intralogistics_Launch_Master.mp4.
The Production Deep Dive
1. Ingesting the Engineering Data
Goal: Convert manufacturing-grade data into animation-ready geometry.
Process: The client provided high-precision Computer-Aided Design files, which are mathematically perfect but topologically dense. Advids utilized a "Retopology" process to rebuild the robot's geometry.
Action: We optimized the mesh density of Robot_Assembly_Master_v12.step, reducing the polygon count by 70 percent without losing visual fidelity. This ensured the robot could be animated smoothly without burdening the render engine.
2. Feedback Loop: Refining the Mechanical Movement
Context: The specific "picking" action of the robot arm is a patented technology and required absolute precision.
Constraint: In our initial animation (Animatic_Arm_Test_v01.mp4), the arm moved with a linear, robotic ease that felt too "digital."
Communication: Through Vimeo Review, the client noted, "The movement is too perfect. The suction cup needs a millisecond of hesitation as it engages the surface of the box to form a seal."
Advids Solution: Our animation team adjusted the F-Curves (animation function curves) to introduce a "settling" motion at the contact point, adding a layer of physical weight and realism that aligned with the actual machine's physics.
3. Overcoming the Polygon Count Barrier (The Critical Juncture)
Challenge: The script called for a "Wide Shot" (00:00) revealing a warehouse containing over 50,000 bins to demonstrate storage density. Loading unique geometry for 50,000 high-resolution bins overwhelmed the GPU memory, causing render failures.
R&D: We needed a way to render this "sea of bins" without compromising texture quality.
Technical Solution: Advids implemented a Geometry Instancing workflow. Instead of loading 50,000 unique objects, we loaded a single "Proxy" bin into memory and told the render engine to reference it 50,000 times. To prevent a repetitive "tiled" look, we utilized a "Random Seed" node in the material shader, which subtly varied the surface imperfections and rotation of each bin instance.
Outcome: We achieved a photorealistic, massive-scale environment (Warehouse_Environment_Master_Scene_v12.c4d) that rendered efficiently at 4K resolution.
4. Visual Asset Strategy
The following visual moments were strategically crafted to anchor the narrative:
| Serial No. | Image Placeholder | Timestamp (Sec) | Rationale | Placement |
|---|---|---|---|---|
| 01 | 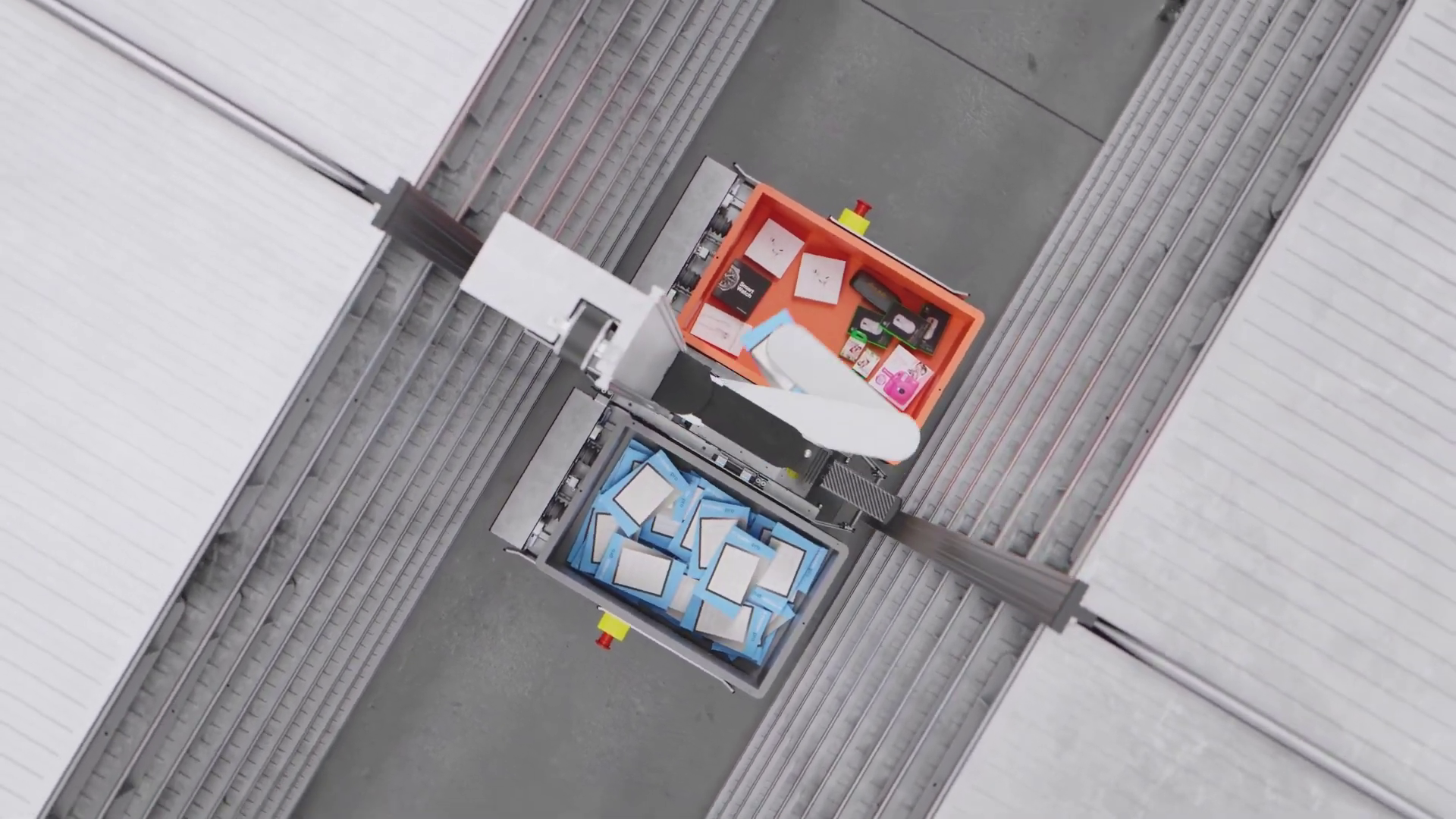 |
00 | The Scale Reveal: Establishing the sheer volume of the warehouse to prove density. | Introduction |
| 02 | 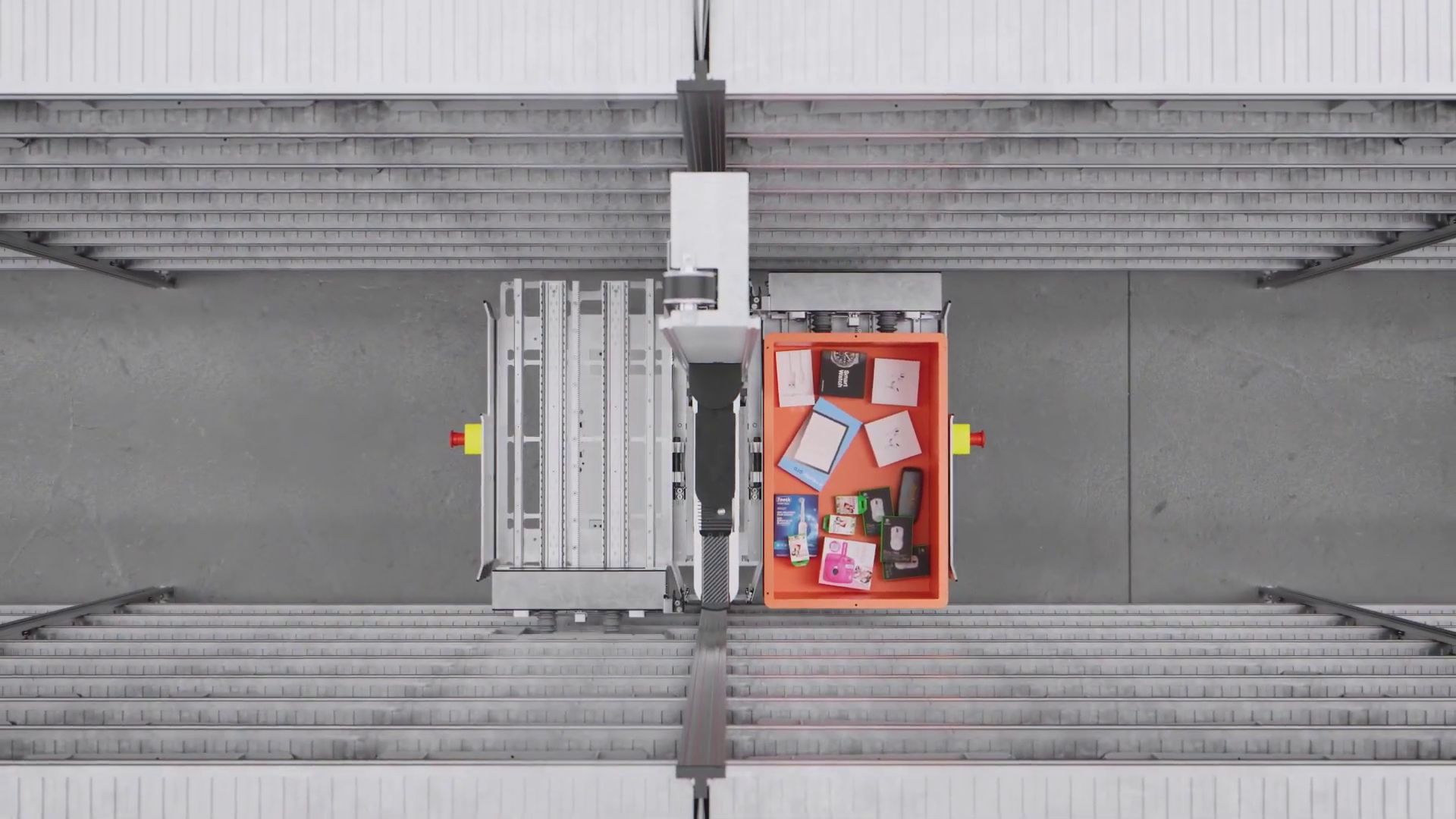 |
18 | Mechanical Precision: A close-up of the picking arm, highlighting the "Goods-to-Person" capability. | Technical Animation |
| 03 | 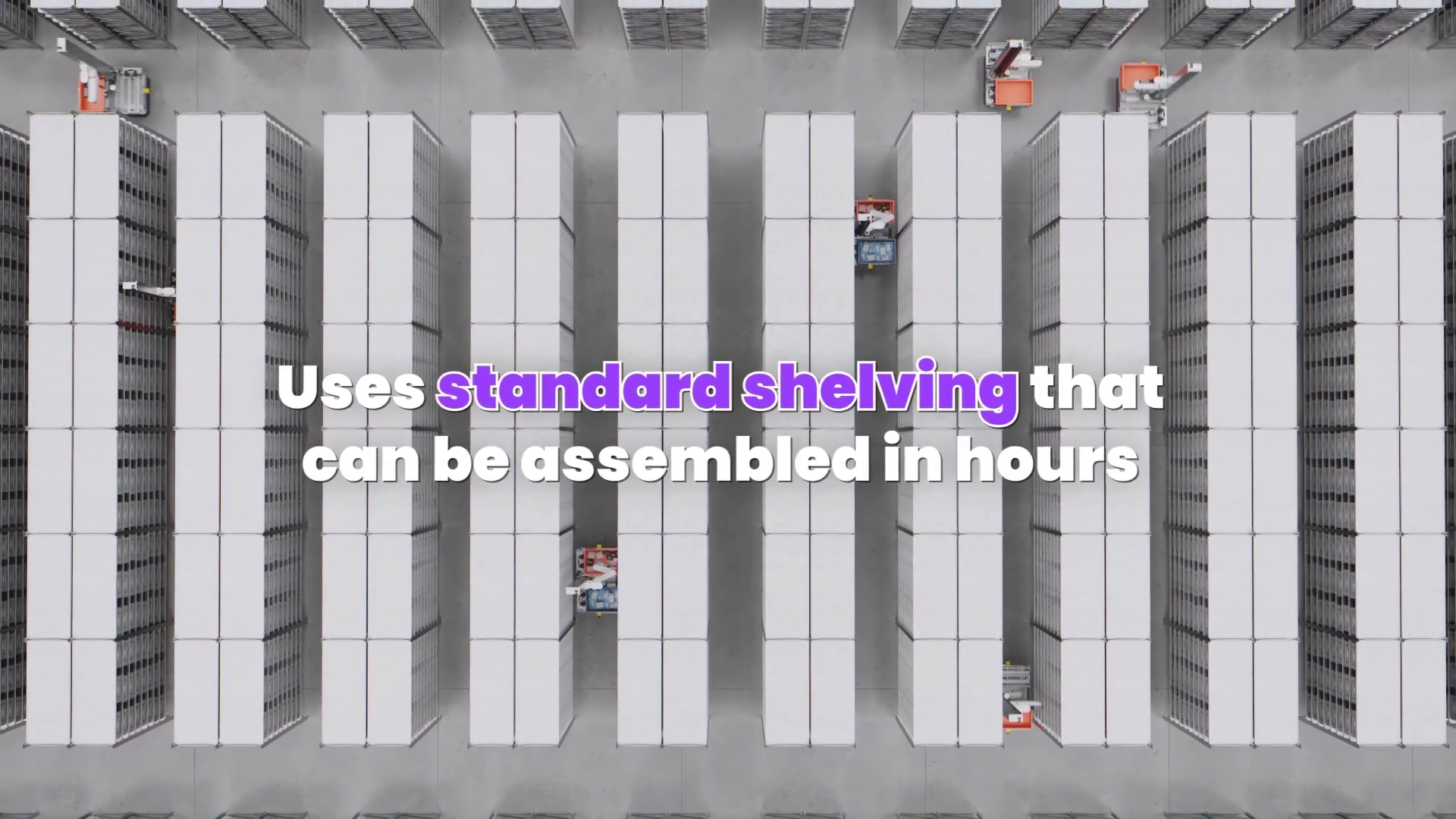 |
30 | Process Clarity: Top-down view showing the seamless transfer from robot to bin. | Workflow Overview |
| 04 | [IMG ASSET 4] | 129 | Multi-Level Scalability: Demonstrating the system's ability to utilize vertical space. | Conclusion |
5. Look Development and Lighting
Goal: Create an environment that felt "clinical and efficient" but not "sterile."
Process: We utilized Image-Based Lighting (IBL) using High Dynamic Range Images (HDRI) captured from real industrial warehouses.
Action: We tweaked the roughness maps on the Material_Polymer_Grey to ensure the bins caught the overhead lights realistically. This attention to surface detail helped ground the simulation in reality, making the "standard shelving" look like physical infrastructure rather than computer-generated blocks.
Synergy Analysis: Precision Meets Perception
This project exemplified the synergy between Engineering Rigor and Visual Persuasion.
- The Technology: Handled the heavy lifting of optimizing millions of polygons and simulating complex kinematic chains.
- The Human Expertise: Advids' creative directors interpreted the client's technical specifications ("reduce picking errors") into visual cues—using focus pulls and clean kinetic typography to guide the viewer's attention to the exact moment the error-reduction technology engages.
Outcomes & Strategic Learnings
The final simulation provided the client with a versatile asset that bridged the gap between engineering and sales.
- Visual Clarity: The video successfully demystified the "Goods-to-Person" workflow, making the invisible logic of the AMRs visible.
- Sales Acceleration: The assets were used to virtually "tour" the facility during remote sales calls, removing the need for physical site visits.
- Strategic Insight: We learned that in intralogistics, the environment is just as important as the robot. Accurately rendering the "standard shelving" was crucial to proving the low barrier to entry for the client's customers.
Advids Next Step: Would you like to explore how a similar "Digital Twin" simulation could visualize your upcoming product infrastructure?
Final Video
Author & Editor Bio